Ensenso SDK
One software for all Ensenso 3D cameras
The free Ensenso SDK provides a uniform interface for all Ensenso 3D cameras. Its main components are the NxView sample program and the NxLib library.
Ensenso PartFinder
Ensenso PartFinder allows you to load your own CAD geometries and locate them in the point clouds of your Ensenso 3D cameras. Through the combined use of depth information, surface normals and texture data, even tricky localisation tasks can be solved. The PartFinder functionality is included in the normal NxLib, however, you need a separate licence to use it. We introduce you to the functionality in this IDS Vision Channel session in further detail.
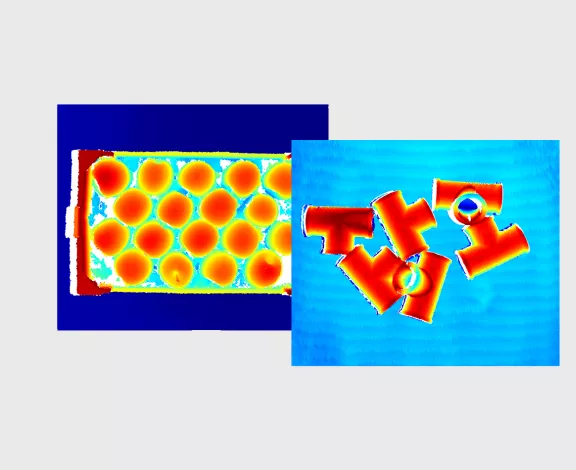
Semi-global stereo matching
Highly parallelized semi-global stereo matching guarantees dense, high quality depth images with per-pixel XYZ coordinates.
Workspace Calibration
Define your workspace coordinate system easily via an Ensenso calibration plate.
Virtual Views
Telecentric height maps with fixed pixel size and orientation enable simplified processing.

Hand-Eye Calibration
Calibrates moving and fixed cameras to 6 axis robots.

Primitive Fitting
Extract geometrical bodies like layers, balls or cylinders from the captured point-clouds.

Pattern Gauging
Measure the calibration plate position accurately to the micrometer and the rotation in real-time.
JSON based API
Use the structured, object-oriented and easily extendable API based on JSON for C, C++ and C#.

Remote Connectivity
Exchange your process or configuration data easily with remote API access via DLL interface or TCP.

Multi-View
Combine multiple stereo cameras to a single capture system for textured point clouds.

Scene Rendering
Get a virtual 3D visualization of textured surfaces captured from multiple cameras.

PatchMatch Stereo Matching
The randomised algorithm for finding correspondences between different image sections enables stereo matching over the entire workspace in one run (can be used with and without FlexView).
NxView
NxView is a sample program with source code which demonstrates the main function of the NxLib library. It allows you to open one or multiple stereo or color cameras and visualizes the captured texture and depth data. Parameters like exposure time, binning, AOI and the stereo matching volume can be adjusted interactively.
NxLib
NxLib is the core library of our SDK. It contains the stereo matching algorithm, calibration and processing functionality.
HALCON Interface
With the HALCON Image Aquisition Interface the Ensenso cameras can be easily integrated into HALCON and HDevelop.
Sample programs
HDevelop Scripts and numerous C, C++ and C# sample programs make it easier to handle the NxLib API.
The sample programm NxView is also available for free as Source Code
Ensenso Selector
You can now use the Ensenso camera selector to help you choose components. Simply enter your parameters in the online configuration tool and it will list the best possible combinations for your application.
Choose accessories
Select suitable accessories for your Ensenso 3D camera.


