Vision-based positioning for installation and surveying work on underwater facilities
On position in rough sea
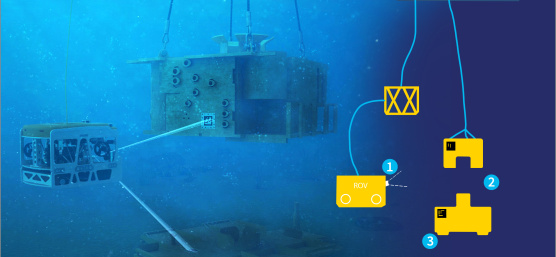
The underwater world is one of the most hostile working environments. It is not only poor visibility, high pressure and varying currents that make conditions difficult. Constantly changing environments, corrosion and deposits also make underwater activities a challenge. For the operators of offshore wind turbines or drilling platforms this is part of their daily bread. Both in the construction of the facilities and in their maintenance. An important basic prerequisite for carrying out any kind of work on the high seas is always precise positioning. Forssea Robotics offers the NAV CAM SUBSEA navigation camera, an all-in-one system for underwater vehicles for accurate determination of the relative and absolute positioning of underwater installations. An industrial camera from IDS Imaging Development Systems GmbH provides the necessary overview.
Application
The demands on the positioning and measurement of offshore plants are high. This applies both to the exact determination of the position of individual installations on the high seas and to the alignment of all installations, e.g. of a wind farm, to each other. Precision is required.
Due to the adverse environmental conditions, equipment used in this area should be designed as simply and intelligently as possible. The underwater navigation camera from Forssea Robotics solves this by using markers. It detects and tracks markings that are applied to underwater installations, such as base parts of wind turbines. On this basis, it calculates their relative and absolute positioning and thus creates the basis for carrying out installation and surveying work. The exact positioning of the components is made possible.

The pre-calibrated camera monitors the markings and sends images in real time to the integrated computer for processing. The latter brings together the visual information using special software - the so-called V-LOC system (Visual Localisation System) - and issues a navigation message. All calculations are performed directly inside the camera. This avoids high bandwidth data transmission to the top side.

The NAV CAM SUBSEA is designed for mounting on remote-controlled or autonomous underwater vehicles (ROVs or AUVs) and serves them directly as navigation and control centre. It features an integrated graphics processor and pressure sensor as well as an interactive navigation system. For existing ROV systems it is thus the first step towards providing autonomous capabilities. This is because it has embedded intelligence in real time: V-LOC calculates the directional heading and the position of the marker. Camera course, tilt and rotation angle are then taken over by the ROV. The relative XYZ accuracy at 3 m distance of the ROV from the target is about 3 mm. Comparable open source systems are currently around 10 - 20 mm. The markers provided by Forssea are certified with a life span of over 25 years and resistant to marine growth.

The navigation camera can for example be installed on the ROV ARGOS, also developed by Forssea Robotics. ARGOS is a light, intelligent ROV designed for a depth of up to 500 m. With simple modifications, the vehicle can dive up to 2000 m. However, as the Forssea camera uses open source tags, the customer is not limited to proprietary systems. The NAV CAM is fully compatible with external gyro sensors (acceleration or position sensors) or ship surveying systems. As an option, it is also available with an on-demand AI toolbox for marking and tracking objects without the use of markers.
Camera
The special operating location of a navigation camera for underwater vehicles also places certain demands on the integrated industrial camera. After all, its image serves as the basis for all position calculations.
“We were looking for a camera that leaves nothing to be desired in terms of dynamic range, sensitivity and linearity. Nevertheless, it should be compact and within our budget. We found it at IDS. The UI-5270CP-C-HQ Rev.2 fulfilled all our requirements.”
The camera model with the 1/1.8" global shutter sensor IMX265 from Sony offers a resolution of 3.2 MP (2056 x 1542 pixels) with a frame rate of 38 fps via the GigE interface. Its extremely light-sensitive sensor is considered one of the best CMOS image sensors in the 3 MP class and guarantees excellent image quality even in low light conditions.
The UI 5270CP-C-HQ Rev.2 industrial camera is a member of the uEye CP product family. CP stands for "Compact Power". This tiny powerhouse for industrial applications of all kinds offers maximum functionality with extensive pixel pre-processing. The cameras deliver data at full GigE speed and, thanks to PoE ("Power over Ethernet"), also allow single-cable operation up to 100 meters. Users can choose from a large number of CMOS sensors with a wide range of resolutions. uEye CP cameras are suitable for applications in automation, automotive, medical technology, life sciences and logistics. They also score in robotics, such as installed in an underwater vehicle, thanks to their patented housing design with dimensions of only 29 x 29 x 29 millimetres.

Outlook
The cameras developed by Forssea Robotics are mainly used in the underwater industry. However, the company is also developing an in-air version of the vision-based positioning technology.
The NAV CAM AIR is an all-in-one surface based visual inclination and positioning centre, which was designed, for example, for in-air monitoring of wind turbine blades and other topside structures. Again, all images are processed in real time with the in-house software to achieve highly accurate positioning.
Image processing offers a wide range of applications on land, in or on the water. It facilitates all kinds of activities, accelerates them or makes them possible in the first place. In this case, the combination of image processing and an IDS industrial camera in the NAV CAM SUBSEA ensures offshore wind turbines are positioned accurately. Now all that remains is for the wind to blow.
Forssea Robotics
Forssea Robotics develops fully integrated robotic solutions to reduce operating costs in the offshore energy markets. Forssea's underwater tools combine cost-effective plug & play hardware, purpose-built embedded intelligence and real-time monitoring.

uEye CP
Model used: UI 5270CP-C-HQ Rev.2

She has been designing company profiles, brochures and case studies for over ten years and has supported corporate topics as well as technical product communication. With her background in strategic B2B communication, she ensures clear messages and well-founded content.
Your project
How can we support you in your project? Together we will find the right solution for you!
Vision Channel
Videos and live sessions about machine vision.
Newsletter
Stay up to date and subscribe to our newsletter.
Applications
Discover how industrial cameras are shaping the future.